Tiež sa vám vybaví pri pohľade na legendárny automobil „KITT“ samo-riaditeľné auto alebo na „Termonátora“ slovo robot? Keďže sa v automatizácii a robotizácii podnikajú veľké pokroky, pravdepodobne ste už narazili aj na oveľa menej „sexy“ robota: AGV. Automated Guided Vehicle čiže automaticky riaditeľný vozík. Tieto prostriedky sa čím častejšie využívajú na prepravu materiálu alebo nástrojov. To umožňuje logistickým profesionálom presné nastavenie tokov spojené s úsporou času a zvýšením vlastnej efektivity.
AGV v logistike
Vývoj v oblasti automaticky riadených vozíkov ide veľkým tempom dopredu: napríklad firma Vanderlande (Holandsko) vyvinula aplikáciu s AGV slúžiace na prepravu a manipuláciu batožiny na letisku. Letisko v Lelystade je prvé holandské letisko, kde boli tieto AGV uvedené do bežnej prevádzky. Po českých a slovenských továrňach a skladoch sa už preháňa stovky AGV v rámci pilotných alebo hotových projektov.
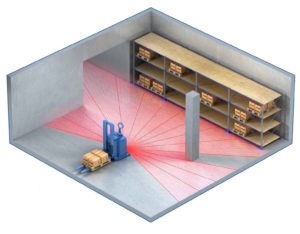
Títo mobilný roboti nachádzajú uplatnenie najmä v prevádzkach, kde sa pravidelne presúva ľahký náklad na dlhšie vzdialenosti. Nečastej sa v priemyselných aplikáciách používajú na prepravu materiálu alebo vo veľkých skladoch na prepravu tovaru. Od konca 20. storočia získavajú títo roboti v logistickom sektore každoročne čoraz väčší význam.

Autonómne riadené vozíky sú mobilné roboty využívajúce ku svojej navigácii rôznych značiek, vodičov v podlahe, magnetických pások alebo sofistikovanejších inštrumentov. Vďaka spôsobu orientácie a riadenia sú tiež známi pod iným označením ako LGV (laserovo riadený vozík), SGV (samo- riadený vozík), ako aj diaľkovo riadené vozíky, autonómne vozíky, AMR (mobilný robot), UGV (bezpilotné pozemné vozidlá) a ďalšie podobné variácie.
Bez ohľadu na konštrukciu riadi AGV automatický navádzací systém, ktorý poháňa AGV a vyhodnocuje jeho polohu v priestore. Väčšina strojov využíva jednu alebo kombináciu viacerých metód pre automatickú navigáciu založené na niektorom z týchto princípov:
Ako sa AGV orientuje v prevádzke?
- Vedenie v dráhe – senzory detekujúce magnetické alebo farebné pásky na podlahe, príp. vodiče umiestnené v podlahe.
- Systémy SLAM – (Simultánna Lokalizácia A Mapovanie) určujúce orientáciu a polohu robota vytvorením mapy okolitého prostredia. Najbežnejšie systémy SLAM vyžívajú optické senzory a skenery. Dva najčastejšie sú vizuálne SLAM (VSLAM, založený na kamere) alebo LIDAR (laserové meranie vzdialenosti).
- Bodová lokalizácia – pomocou odraziek, čiarových a QR kódov na podlahe alebo čítanie RFID.
- Rádiová lokalizácia – pomocou identifikácie a komunikácie v GPS, GSM alebo UWB sieti.
Požiadavky na pohony mobilných robotov

Rozmerovo menšie AGV majú zvyčajne 3-4 kolesá, z ktorých najčastejšie dve, paralelne umiestnené, sú hnané a zostávajúce slúžia ako podperná. Ak sa poháňané kolesá otáča rovnomerne, potom AGV ide rovno, ak niektoré jede pomalšie alebo dokonca opačným smerom dochádza k zatáčaniu / otáčaniu robota. U ťažkotonážnych AGV vozidiel sú k riadeniu používané doplnkové riadiace mechanizmy kolies a často tiež niekoľko riaditeľných náprav.
Požiadavky na nepretržitú prevádzku vozíkov a prepravy kladú vysoké nároky ak na kvalitu konštrukcie, tak aj na veľkú mechanickú odolnosť dielov, a to platí aj u prevodoviek. Tie sa využívajú hlavne na pohon autonómnych vozíkov.
V závislosti na konštrukcii podvozku spočíva celá hmotnosť vozidla a užitého zaťaženia priamo na výstupnom ložisku prevodovky, pretože tá sa najčastejšie ukrýva priamo v poháňanom kole. To má za následok pôsobenia vysokých radiálnych síl a klopných momentov. Navyše kvôli obmedzenému priestoru musí byť prevodovka mimoriadne kompaktná s úspornou priestoru.
Pre všetky elektricky poháňané vozidlá je takisto obmedzujúcim prvkom kapacita akumulátorov. Preto je veľmi dôležité čo najefektívnejšie premeniť elektrickú energiu na kinetickú.
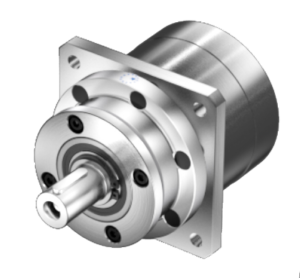
Práve z vyše uvedených dôvodov, a aby uľahčil prácu všetkým nadšeným konštruktérom, uvádza APEX DYNAMICS na trh radu GL – kompaktné planétové prevodovky s vysokou účinnosťou a vysokým radiálnym zaťažením, ktorá zodpovedá vyššie uvedeným požiadavkám a aktuálnym trendom v konštrukcii AGV.
Medzi hlavné prednosti rady GL patrí:

- Vysoké radiálne zaťaženie výstupnej príruby s možnosťou priamej montáže kolesa.
- Vysoká účinnosť až 97%, vďaka ktorej dochádza k minimálnym stratám.
- Nízka vôľa v prevodoch pre precízne riadenie.
- Optimalizovaný moment zotrvačnosti pre veľkú dynamiku.
- Limitovaný vzostup teploty zamedzujúce prehrievaniu.
- Veľké výstupné krútiace momenty v malom tele.
- Dlhá životnosť.
Voľba pohonu podľa podvozku
K rozhýbanie autonómnych vozíkov sa najčastejšie používajú servopohony alebo krokové a BLDC motory. K planétovým prevodovkám rady GL je možné pripojiť takmer akýkoľvek motor popredných výrobcov pohonov, o čom sa môžete presvedčiť v našom on-line konfigurátoru. Planétová prevodovka GL aj s motorom je potom upevnená pomocou štvorcovej montážnej príruby priamo na podvozku AGV. To sa týka najčastejšie AGV s pevným podvozkom.
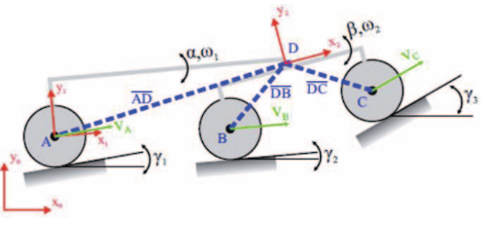
Čo keď ale navrhujete sofistikovanejší podvozok s nezávislým zavesením kolies alebo UGV do terénu s tzv. Lokomočním mechanizmom (kolesá na ramenách)? Tu nie je žiaduce priame napojenie pohonu. Pohon potom musí byť vzdialený od kolies, aby neprekážal v teréne.
Aj pre takéto špecifické prípady má APEX DYNAMICS riešenie. A to v podobe GLS – na vstupe s plným hriadeľom. Ku hriadeli je možné pripojiť remenice, torzné tyče a ďalšie mechanické komponenty k prenosu krútiaceho momentu zo vzdialeného pohonu.
Osvedčené riešenie
Na základoch viac ako 30 rokov nazhromaždených skúseností sme schopní takisto vypočítať minimálne požiadavky na samotný pohon príp. odporučiť priamo optimálny typ pohonu od vami preferovaného výrobcu. Naši zákazníci a partneri oceňujú našu vysokú technickú odbornosť a poradenstvo spolu s komplexnými ponukami vrátane konkrétnych riešení ich požiadaviek na aplikácie.
Sme špecialisti v oblasti automatizačnej techniky a svojej práci rozumieme. Neveríte? Tak to skúste. S nami ste vždy o krok napred!